سامانههای موقعیتیابی درونساختمانی (IPS)
فهرست مطالب
مقدمه
مقدمه
سامانههای موقعیتیابی درونساختمانی (Indoor Positioning Systems – IPS) در چند دههی اخیر به دلیل رشد سریع دستگاههای همراه، اینترنت اشیاء (IoT)، و نیاز روزافزون به خدمات مبتنی بر مکان (Location-Based Services) اهمیت پیدا کردهاند. این سرویسها برای بهرهوری بیشتر در فضاهای باز بسیار مناسباند، اما در فضاهای داخلی با چالشهایی روبهرو میشوند که لازم است به آنها پاسخ داده شود.
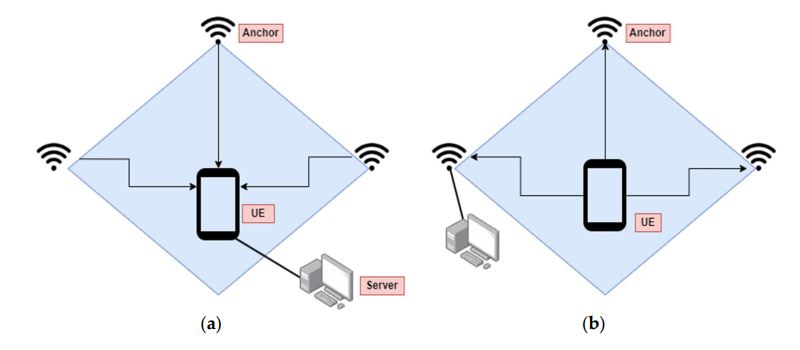
دو نوع از موقعیت یابی با تلفن همراه داریم :
برای برنامههای ناوبری، معماری موقعیتیابی مبتنی بر دستگاه تلفن همراه ترجیح داده میشود. در حالت مبتنی بر تلفن همراه، کاربران تلفن همراه سیگنالهایی را از گرههای لنگر دریافت میکنند تا موقعیت مکانی خود را در محیط داخلی تعیین کنند. معایب خود را دارد: پردازش محلیسازی در دستگاه کاربر انجام میشود که بر سایر کاربران یا گرههای لنگر تأثیری ندارد. در حالی که این رویکرد بار پردازش را بر دوش دستگاههای تلفن همراه قرار میدهد، مقیاسپذیری سیستم را افزایش میدهد و امکان ردیابی همزمان بسیاری از کاربران را در یک منطقه بزرگتر فراهم میکند. شکل زیر معماری مبتنی بر دستگاه تلفن همراه را نشان میدهد. برای موقعیتیابی کاربر، روش موقعیتیابی مبتنی بر لنگر به این صورت است که، گرههای لنگر (نقاط مرجع) سیگنالهایی از کاربران سیار دریافت میکنند تا موقعیتیابی و خدمات مرتبط را تسهیل نمایند. انتخاب توپولوژی موقعیتیابی مستقیماً بر طراحی معماری سیستم بر اساس اهداف کاربردی تأثیر میگذارد. برخلاف معماری شامل یک فرآیند موقعیتیابی سمت سرور است که در آن سرور به طور همزمان چندین درخواست کاربر را در یک محیط داخلی مدیریت میکند. اگرچه این معماری از نظر حفظ عملکرد اصلی ارتباطی فناوری بیسیم مزیت دارد، اما میتواند به دلیل مدیریت درخواستهای همزمان توسط سرور، تأخیر ایجاد کند. شکل زیر معماری را نشان میدهد.
چرا موقعیتیابی در فضای داخلی چالشبرانگیز است؟
-
تضعیف سیگنال (Signal Attenuation)
دیوارها، کف، سقف و مصالح ساختمانی بهویژه بتن، فلز، شیشه چند لایه و مواد سنگین شدت سیگنالهای رادیویی یا ماهوارهای را کاهش میدهند. این امر باعث میشود سیگنالهایی که خارج ساختمان قویاند، به داخل ساختمان با توان کم برسند و گاهی زیر سطح نویز آشکارساز قرار گیرند. -
بازتابها و چندمسیره بودن (Multipath Propagation)
سیگنالها پس از عبور یا برخورد با موانع بازتابیده میشوند و مسیر مستقیمشان را تغییر میدهند. این امر موجب ایجاد چند مسیر مختلف برای رسیدن سیگنال به گیرنده میشود که ممکن است زمان رسیدن را تغییر دهد یا سیگنالهای بازتابی باعث خطای موقعیتیابی شوند. محیط داخلی بهدلیل وجود موانع زیاد، مبلمان، دیوارها، و کفها، این مشکل بیشتر است. -
ناپایداری شرایط محیطی و تغییرات فضا
مبلمان جابهجا میشوند، افراد متحرک هستند، در و پنجرهها ممکن است باز یا بسته شوند، و اغلب دمای محیط و روشنایی تغییر میکند؛ همهی اینها بر انتشار و قدرت سیگنال تأثیر میگذارند. بنابراین سامانه باید به تغییرات محیطی مقاوم باشد و قابلیت بهروزرسانی داشته باشد. -
نیاز به زیرساخت یا سختافزار خاص
برخی روشها نیاز به نصب فرستندهها یا Beacon های مخصوص، یا استفاده از تجهیزات خاص (آنتنهای جهتدار، امکانات سختافزاری پیشرفته) دارند که هزینه، زمان نصب و نگهداری را افزایش میدهد. یکی از اهداف سامانههای فراگیر این است که تا جای ممکن از زیرساختهای موجود استفاده کنند، مانند شبکههای Wi-Fi معمولی یا تلفن همراه مردم. -
مقیاسپذیری و هزینه
برای اینکه سامانه IPS مفید باشد، باید در سراسر یک ساختمان یا مجموعه بزرگی قابل استفاده باشد، نه فقط در چند نقطه آزمایشی. این بدین معناست که جمعآوری داده موقعیتهای مرجع (کلکسیون نقاط مرجع)، پردازش حجم زیادی از داده، و نگهداری در شرایطی که محیط تغییر میکند، چالشهایی اساسیاند. -
دقت و قابلیت اطمینان
بسته به روش انتخابی، دقت ممکن است از چند سانتیمتر تا چند متر متغیر باشد. همچنین باید سامانه بتواند در حضور نویز، تغییرات زمانی، و شرایط متفاوت محیطی عملکرد قابل قبولی داشته باشد.
اهمیت سامانههای موقعیتیابی درونساختمانی
- امکان ارائه خدمات جدید راهنمای مسیر داخل ساختمانها مانند بیمارستانها، دانشگاهها، پاساژها.
- بهبود کارایی در مدیریت داراییها و تجهیزات، به ویژه در محیطهایی که اشیاء یا افراد باید سریع پیدا شوند (مثلاً تجهیزات پزشکی در بیمارستان).
- افزایش رضایت کاربران/مراجعهکنندگان به دلیل کاهش سردرگمی، اتلاف وقت و جستجو در فضاها.
- تسهیل بازاریابی مبتنی بر مکان و ارائه تجربههای شخصیتر.
- کمک به امور ایمنی و مدیریت بحران؛ در شرایط اضطراری باید موقعیت دقیق افراد و راه خروج سریع تعیین شود.
وضعیت فعلی و روندهای نوین
- روشهایی مانند اثرانگشتنگاری سیگنال Wi-Fi (Wi-Fi fingerprinting) به دلیل استفاده از زیرساخت موجود و دقت مناسب، محبوبیت یافتهاند.
- فناوریهای ترکیبی (Hybrid) که چند روش را با هم ترکیب میکنند (مثلاً Wi-Fi با حسگرهای اینرسی یا بلوتوث) برای بهبود دقت و مقاومت در مقابل مشکلات چندمسیره و تغییرات محیطی در حال گسترشاند.
- تحقیقات جدید بر بهبود دقت، سازگاری، کاهش هزینه نصب و نگهداری متمرکزند، مانند کاهش تعداد نقاط مرجع، استفاده از روشهای یادگیری عمیق، بهکارگیری فیلترهای تطبیقی
اهداف
- توسعه یک سامانهی موقعیتیابی داخلی بر پایهی Wi-Fi Fingerprinting.
- ارائهی سیستمی دقیق، کمهزینه و بدون نیاز به زیرساخت جدید.
- بهکارگیری روشهای یادگیری ماشین مانند: k-نزدیکترین همسایه (kNN)
بیان مسئله
- ساختمانهای بزرگ (بیمارستانها، دانشگاهها، مراکز خرید) سبب سرگردانی کاربران در مسیریابی میشوند.
- سامانهی IPS باید بتواند:
- موقعیت فعلی کاربر را تشخیص دهد.
- مسیر کوتاه تا مقصد را نمایش دهد.
- این سامانه باید تنها به زیرساخت موجود (مثلاً Wi-Fi) وابسته باشد.
کاربردها
- فروشگاهها و سوپرمارکتها → اتصال سبد خرید هوشمند به RFID و Wi-Fi برای مسیریابی و مدیریت خرید.
- موزهها → راهنمایی بازدیدکنندگان و ارائه اطلاعات با بلوتوث یا Wi-Fi.
- کتابخانهها → هدایت دانشجویان به سمت قفسههای خاص.
- بازاریابی مبتنی بر مکان → ارسال تبلیغات و پیشنهادهای شخصیسازیشده به کاربران.
- بیمارستانها و خدمات اضطراری → ردیابی بیماران، پزشکان و تجهیزات برای افزایش کارایی.
فناوریها
- RFID → کمهزینه و سبک، اما برد کوتاه دارد.
- فراصوت (Ultrasound) → دقت بالا، اما برد محدود.
- Wi-Fi → در همهجا موجود و مقرونبهصرفه.
- بلوتوث کممصرف (BLE) → نیاز به Beacon، هزینه کم و پرکاربرد در فروشگاهها.
- UWB (باند فوقعریض) → دقت بسیار بالا، اما پرهزینه.
- فروسرخ (IR) → نیاز به دید مستقیم (line of sight).
- میدان مغناطیسی → استفاده از اختلالات میدان زمین، حساس به فلزات.
- سامانه ناوبری اینرسی (INS) → متکی بر شتابسنج/ژیروسکوپ، ولی خطای تجمعی دارد.
- روشهای ترکیبی (Hybrid) → استفاده از چند فناوری برای افزایش دقت.
جدول: مقایسه فناوریهای سیستمهای موقعیتیاب درونساختمانی
| نام فناوری | مزایا | معایب | مقیاس دقت |
|---|---|---|---|
| شناسهرادیویی | هزینه پایین | برد کوتاه، ظرفیت ارتباطی پایین | سانتیمتر |
| فراصوت | دقت موقعیتیابی بالا | اثر چندمسیری، اثر رانش حرارتی، هزینه بالا | سانتیمتر |
| وایفای | بدون نیاز به پیادهسازی زیرساخت اضافی، هزینه پایین، قابلیت استفاده در کاربردهای متنوع | عملیات انگشتنگاری برای موقعیتیابی زمانبر است، تضعیف سیگنال وایفای | متر |
| بلوتوث | مصرف انرژی پایین، پیادهسازی آسان | برد کوتاه | متر |
| باند فوق عریض | دقت بالا، مقاوم به تداخل فرکانسی، قدرت نفوذ بالا | هزینه بالا | سانتیمتر- متر |
| مادون قرمز | هزینه پایین | ضعف در مقابل تداخلهای نوری و حرارتی | متر |
| مغناطیس | هزینه پایین | نیاز به نقشهبرداری | متر |
| اینرسی | هزینه پایین | خطای انباشتشونده | متر |
روشهای موقعیتیابی
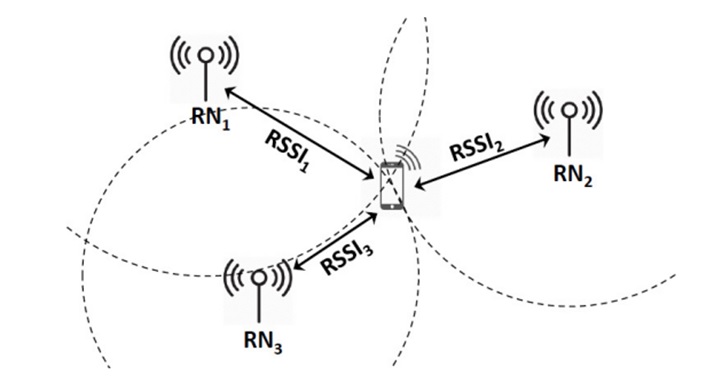
روش قدرت سیگنال دریافتی (RSS)
وایفای نام یک فناوری معروف شبکه بیسیم بوده و در فرکانسهای ۲٫۴ گیگاهرتز و ۵ گیگاهرتز عمل میکند.
- ایده: فاصله از منبع → کاهش توان سیگنال.
- معادله:
که در آن:
- n → توان افت مسیر (۲ تا ۴)
- A → توان مرجع در فاصلهی $d_0$
امروزه اکثر تلفنهایهمراه، لپتاپها و وسایل الکترونیکی قابلحمل از این فناوری پشتیبانی کرده و استفاده از این فناوری یکی از ارکان اصلی موقعیتیابی فراگیر میباشد.
در رابطه بالا، RSS مقدار قدرت سیگنال در نقطه موردنظر، n ضریب افت مسیر است که بین 2 در فضای آزاد تا 4 در فضایداخلی تغییر میکند. A مقدار قدرت سیگنال در نقطه مرجع، d0 فاصله نقطه مرجع تا فرستنده و d فاصله نقطه موردنظر تا فرستنده میباشد. به کمک این رابطه میتوان فاصله نقطه موردنظر از نقطه مرجع را بدستآورد. این رابطه در فضای دوبعدی معادله یک دایره و در فضای سه بعدی معادله یک کره را مشخص میکند. در روش سهپهلوبندی با داشتن سه معادله فاصله و بدست آوردن نقطه تقاطع آنها موقعیت شی موردنظر بدست میآید. عموما به دلیل وجود نویز و خطا در محاسبات، نقطه تقاطع بهراحتی و بصورت یکتا بدست نیامده و باید از روشهای مبتنی بر حداقل مربعات برای پیشبینی موقعیت استفادهکرد.
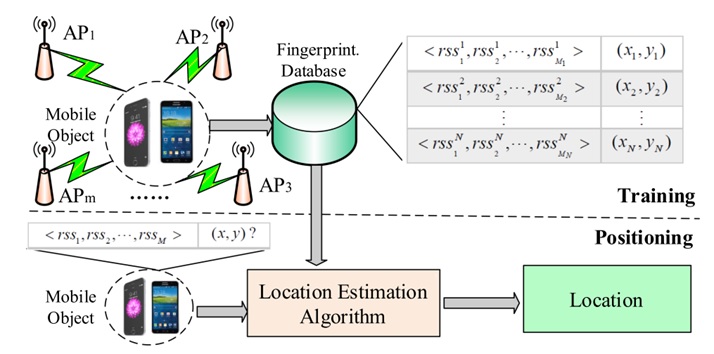
روش اثرانگشتی (Fingerprinting)
- مرحله آفلاین: ثبت قدرت سیگنال در نقاط مرجع.
- مرحله آنلاین: مقایسه دادههای فعلی با پایگاه داده.
- مناسب برای محیطهای شلوغ با بازتابهای زیاد.
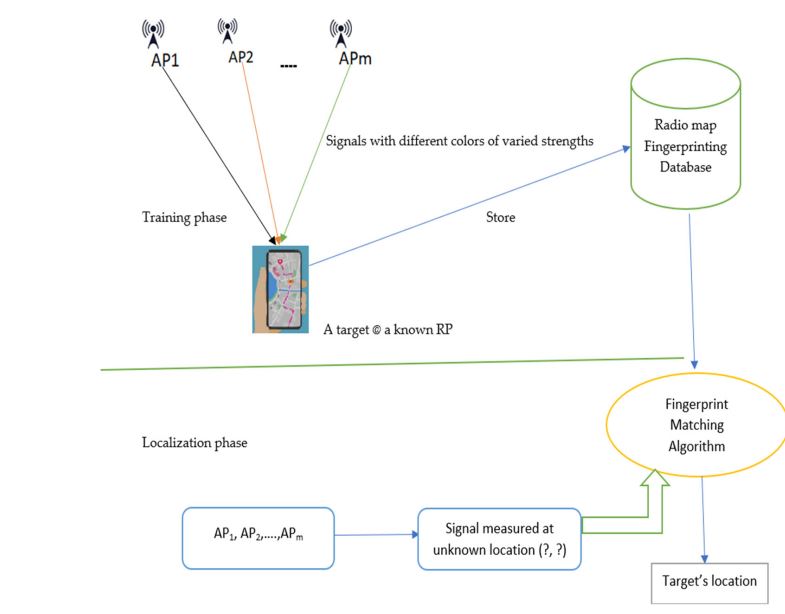
این روش موقعیتیابی از دو فاز برونخط و برخط تشکیلشدهاست. جمعآوری داده در فاز برونخط انجامشده و پیشبینی موقعیت در فاز برخط صورت میگیرد. انگشتنگاری مبتنی بر قدرت سیگنال وایفای یکی از مرسومترین روشهای موقعیتیابی میباشد که نحوه کار آن به شرح زیر است. فاز برونخط: قدرت سیگنال وایفای رسیدهشده به دستگاه از نقاط دسترسی مختلف ثبتشده و بردار قدرت سیگنال تشکیلداده میشود. این بردار ابعادی برابر با تعداد نقاط دسترسی دارد که هر درایه آن قدرت سیگنال یک نقطه دسترسی را نشان میدهد. به دلیل اینکه جمع آوری داده در تمام نقاط امکانپذیر نبوده، نقاط مشخصی به عنوان نقاط مرجع انتخاب شده و پایگاه داده قدرت سیگنال بر اساس آنها ساخته میشود. همچنین در این مرحله برروی داده پیشپردازشهایی مانند نرمالسازی و درونیابی مقادیر ثبت نشده انجام شده و نقشه رادیویی از محیط تهیه میشود. در این فاز یک مدل یادگیر برروی دادهها آموزش داده میشود. در پژوهشها از مدلهای مختلف مانند مدلهای قطعی، احتمالی و مبتنی بر شبکهعصبی استفاده شدهاست. فاز برخط: در این فاز قدرت سیگنال از یک نقطه (که الزاما از نقاط مرجع نمیباشد) دریافت شده و به مدل یادگیر داده میشود. خروجی مدل یادگیر موقعیت پیشبینیشده است. روش انگشتنگاری یک روش گسسته بوده که براساس ایجاد یک تناظر بین فضای جغرافیایی و فضای سیگنال میباشد. دقت این روش به تعداد نقاط مرجع وابسته بوده که هرچه تعداد آن بیشتر باشد، دقت موقعیتیابی نیز افزایش مییابد. باید توجه داشت با افزایش تعداد نقاط مرجع، فاز برونخط این روش سختتر و زمانگیرتر میشود. همچنین در تعداد نقاط مرجع بالا، این امکان وجود دارد که تفاوت سیگنال بین دو نقطه مجاور کمتر از نویز سیستم و اندازهگیری بوده و عملا تمایز بین دو نقطه امکانپذیر نباشد.
زمان رسیدن (ToA)
روش زمان ورود از مدت زمان انتشار سیگنال برای محاسبه فاصله بین گیرنده و فرستنده استفاده میکند. با ضرب مدت زمان انتشار سیگنال در سرعت نور (۳×〖۱۰〗^۸ متر بر ثانیه) برای امواج رادیویی و سرعت صوت برای امواج صوتی (۳۴۳متر بر ثانیه)، تخمینی از فاصله بدست میآید. با خطای اندازهگیری برابر با ۱ میکروثانیه ، خطایی 300 متری در هنگام استفاده از امواج رادیویی و خطایی برابر با 0٫00034359 متر در استفاده از امواج صوتی به سیستم موقعیتیاب تحمیل میشود. همانند روش قدرت سیگنال دریافتی با داشتن فاصله از سه نقطه مرجع و بهرهگیری از روابط هندسی، موقعیت شی موردنظر بدستآمده که درشکل زیراین موضوع نشان دادهشدهاست.
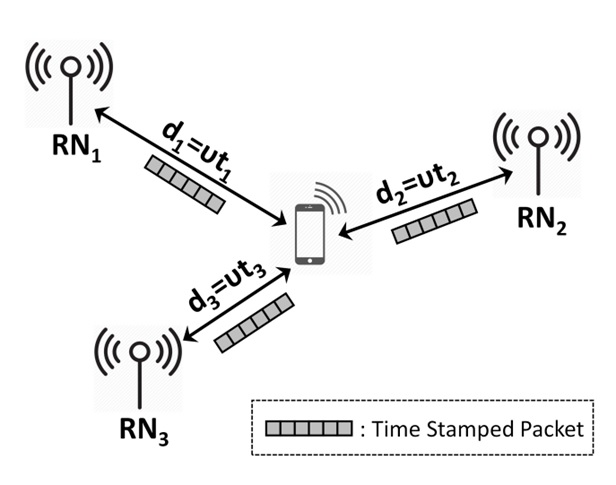
سیگنال با برخورد به موانع احتمالی که در مسیر وجود دارند، بازتاب شده و زمان بیشتری برای انتشار بین فرستنده و گیرنده سپری میشود که باعث وقوع خطا در محاسبه موقعیت شی موردنظر میشود. به همین دلیل برای دستیابی به دقت موقعیتیابی مناسب، نیاز به خط دید مستقیم بین فرستنده و گیرنده وجود دارد. در روش زمان ورود برای عملکرد مناسب نیاز به همگامسازی بین فرستنده و گیرنده وجود داشته و حتی شاید بنابر پروتکل ارتباطی نیاز به ارسال برچسب زمان همراه دادهها باشد. دو عامل مهم تاثیرگذار در دقت این روش پهنایباند سیگنال و نرخ نمونهبرداری میباشد. روش زمان ورود بر اساس رابطه زیر عملکرده که در این رابطه t_1 برابر با زمان ارسال پیام فرستنده i ام و t_2 زمان دریافت پیام توسط گیرنده j ام بوده و v سرعت سیگنال میباشد. فاصله بین گیرنده i ام و فرستنده j ام با D_ij نشان داده شده است.
- فاصله با اختلاف زمان ارسال و دریافت محاسبه میشود:
که v سرعت انتشار (نور یا صوت) است.
اختلاف زمان رسیدن (TDoA)
- اختلاف زمان رسیدن سیگنال به چند گیرنده:
- ایجاد معادلات هذلولوی برای تخمین موقعیت.
زاویه ورود سیگنال (AoA)
- با استفاده از آرایه آنتن، جهت سیگنال تعیین میشود.
- دقت بالا، اما نیازمند سختافزار گران.
فرمولها
| روش | معادله | توضیح کوتاه |
|---|---|---|
| RSS | $RSS = -10n \log_{10}(d/d_0) + A$ | بر اساس افت توان سیگنال |
| ToA | $D = (t_2 - t_1) \cdot v$ | محاسبه فاصله با زمان رسیدن |
| TDoA | $L_{D(i,j)} = c \cdot T_{D(i,j)}$ | اختلاف زمان چند گیرنده |
| AoA | مبتنی بر زاویه دریافت | نیازمند آرایه آنتن |
کلمات کلیدی با لینکهای مفید
در ادامه برخی کلمات مهم همراه با لینک به مقالات و منابع مفید برای مطالعه بیشتر:
- Wi-Fi CSI fingerprinting-based indoor positioning
- BLE challenges for indoor positioning
- SWOT analysis of CSI-based indoor positioning systems
- Multipath Propagation
- Non-line-of-sight (NLOS)
- Adaptive Long-Term Wi-Fi Localisation (Ada-LT IP)
تماس با من
Hadi Sadoghi Yazdi
AI and Data Specialist
Email: h-sadoghi@um.ac.ir
Phone: +98-51-38805117
Website: https://h-sadoghi.github.io/ | https://hadisadoghiyazdi1971.github.io/