
موتور پلهای (Stepper Motor)
نویسنده: مهیار کفائی
دانشگاه فردوسی مشهد
فهرست مطالب
- مقدمه
- اصول کار
- روابط موتور پلهای
- مقایسه با سایر موتورها
- انواع موتورهای پلهای و مقایسه عملکرد آنها
- انواع سیمپیچی موتورهای پلهای
- مزایا و معایب موتورهای پلهای
- کاربردهای موتور پلهای
- بررسی یکی از کاربردهای موتور پلهای در صنعت
- منابع
مقدمه
موتورهای پلهای یکی از پرکاربردترین محرکهای الکتریکی در سیستمهای کنترل حرکت و موقعیتیابی هستند. ویژگی اصلی این موتورها توانایی آنها در تبدیل پالسهای الکتریکی به حرکت زاویهای گسسته است. به عبارت دیگر، هر پالس ورودی معادل با یک گام مشخص در چرخش محور موتور خواهد بود. این خاصیت باعث شده است که موتورهای پلهای بدون نیاز به سامانههای پیچیده بازخورد، بتوانند در بسیاری از کاربردها بهصورت حلقه باز موقعیت و سرعت را با دقت مناسب کنترل کنند.
هدف اصلی این پژوهش، شناخت کامل موتورهای پلهای از نظر اصول کاری، انواع، روشهای کنترلی و کاربردهای صنعتی است. در این راستا، پژوهش بهطور ویژه به درک مبانی عملکرد موتور پلهای، بررسی مدلهای کنترلی، معرفی و مقایسه انواع مختلف این موتورها، مطالعه حوزههای کاربردی آن در صنعت و زندگی روزمره، و در نهایت شبیهسازی یک سیستم کنترلی مبتنی بر موتور پلهای میپردازد.
اصول کار
تعریف کلی و عملکرد
موتور پلهای نوعی موتور الکتریکی سنکرون است که حرکت آن به صورت زاویههای گسسته (Step) انجام میشود. به عبارت دیگر، هر پالس الکتریکی که به موتور اعمال شود، روتور موتور به اندازهی یک زاویهی مشخص میچرخد. این ویژگی باعث میشود که بتوان بدون نیاز به سنسور موقعیت (در حالت Open-loop) کنترل دقیقی روی موقعیت و سرعت داشت.
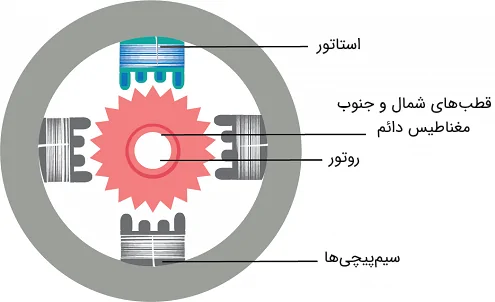
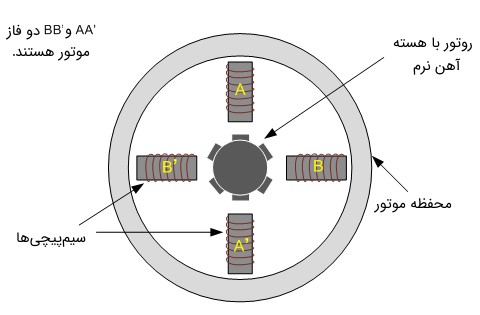
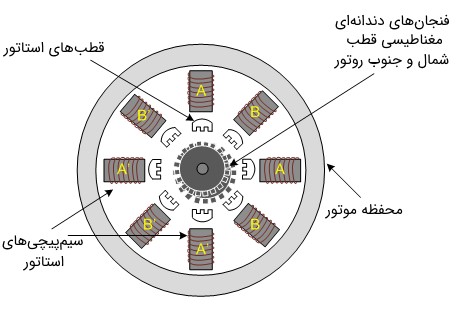
مانند سایر موتورهای الکتریکی، موتور پلهای یک بخش متحرک به نام روتور (Rotor) و یک بخش ثابت به نام استاتور (Stator) دارد. استاتور و روتور قطبهای مغناطیسی دارند و با انرژیدار کردن قطبهای استاتور، روتور برای تراز شدن با استاتور حرکت میکند. روتور یک قطعه آهن دندانهدار به شکل چرخدهنده است. استاتور نیز از مجموعه آهنرباهای الکتریکی تشکیل شده که در حول محور دندانهدار مرکزی قرار گرفتهاند.
وقتی جریان از سیمپیچیهای فاز موتور پلهای عبور کند، شار مغناطیسی در استاتور و عمود بر جهت گذر جریان به وجود میآید. آهنرباها به طور همزمان انرژیدار میشوند. هنگامی که یک آهنربا با کمک یک مدار درایور خارجی یا میکروکنترلر انرژی میگیرد، شفت یا محور روتور طوری میچرخد که نسبت به استاتور در موقعیتی قرار گیرد که کمترین مقاومت را در برابر شار داشته باشد. این بدین معنی است که الکترومگنت (آهنربای الکتریکی) آن دندانههایی از چرخدنده را جذب میکند که نسبت به بقیه آهنرباها انحراف دارند. به همین دلیل، هنگامی که آهنربای بعدی روشن یا برقدار است، آهنربای قبلی خاموش میشود که منجر به جذب دندانههای چرخدهنده توسط آهنربای دوم خواهد شد. بنابراین، چرخش روتور به صورت پلهای خواهد بود و تعداد پلهها عدد صحیحی است که با توجه به زاویه حرکت در هر مرحله تعیین میشود.
تصویر متحرک زیر، نحوه چرخش روتور را نشان میدهد:
مد های تحریک
با کنترل زاویه هر پله، میتوانیم دقت و نرمی چرخش روتورِ موتور را کنترل کنیم. در موتور پلهای، سه مُد یا حالت تحریک وجود دارد که در شکل زیر نشان داده شدهاند.
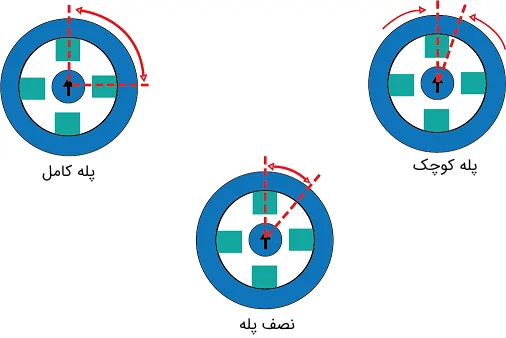
عملکرد پله کامل
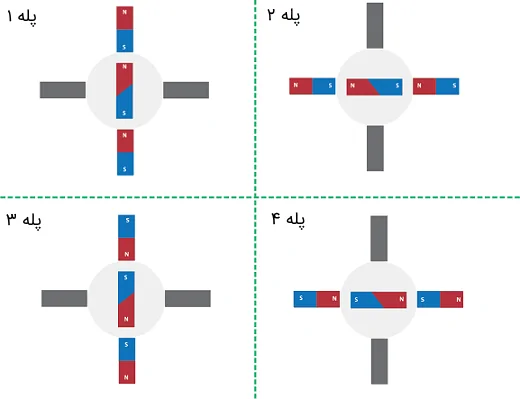
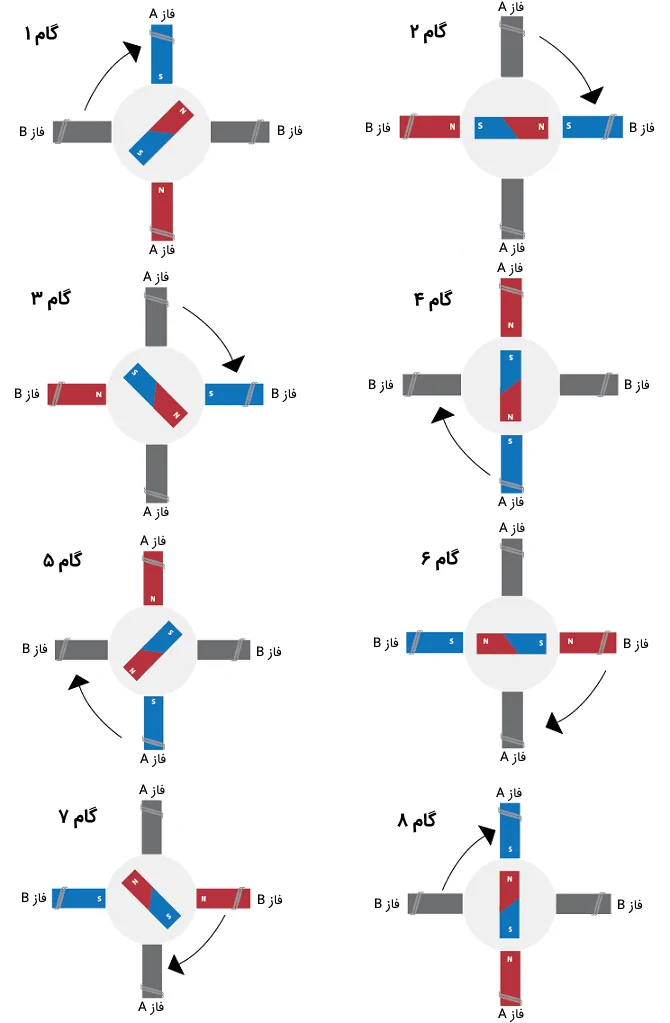
در این حالت، روتور در یک مرحله به اندازه زاویه پایه 1٫8 درجه حرکت میکند و بدین ترتیب 200 پله برای اتمام چرخش آن لازم است. میتوانیم این حالت را با انرژیدار کردن فقط یک فاز از سیمپیچهای استاتور یا دو فاز عملی کنیم. عملکرد با یک فاز حداقل توان را از مدار درایور مصرف خواهد کرد. از سوی دیگر، وقتی دو فاز را در یک لحظه انرژیدار میکنیم، گشتاور و سرعت زیاد میشود. در تصویر چهار مرحلهی چرخش روتور در حالت پلهکامل نشان داده شده است. روتور همان قسمت دایرهای وسط است (آهنربای دائم N و S)، و استاتور چهار قطب در اطراف دارد (که با جریان، قطب N یا S میشوند).
پله 1:
فاز عمودی (بالا و پایین) فعال شده است. قطب شمال و جنوب استاتور طوری قرار دارند که روتور در راستای عمودی (۰ درجه) میایستد. این موقعیت اولیهی روتور است.
پله 2:
انرژی از فاز عمودی به فاز افقی (چپ و راست) منتقل میشود. روتور ۹۰ درجه در جهت عقربههای ساعت میچرخد تا با میدان مغناطیسی جدید همراستا شود. الان محور روتور افقی است.
پله 3:
دوباره فاز عمودی فعال میشود، اما پلاریتهاش برعکس شده است (یعنی N و S جابجا شدهاند). روتور دوباره ۹۰ درجه دیگر میچرخد تا با میدان جدید همسو شود. حالا روتور ۱۸۰ درجه از موقعیت اولیه چرخیده.
پله 4:
انرژی به فاز افقی (چپ و راست) برمیگردد، اما این بار با پلاریتهی معکوس. روتور ۲۷۰ درجه از وضعیت اولیه چرخیده است. اگر یک پلهی دیگر انجام شود (بازگشت به فاز ۱)، روتور یک دور کامل (۳۶۰ درجه) را کامل کرده است.
عملکرد نصف پله
در این حالت، روتور به اندازه نصف زاویه پایه یک پله کامل میچرخد و در نتیجه گشتاور نسبت به عملکرد پله کامل بهبود مییابد. همچنین، نرمی و دقت حرکت دو برابر میشود. در تصویر بالا، ۸ گام (Step) نشان داده شده که مجموعاً برابر با ۴ پله کامل است. هر دو گام برابر با یک پله کامل محسوب میشوند.
گام 1:
فقط فاز A فعال است. روتور طوری میچرخد که قطبهای N و S آن در راستای فاز A قرار بگیرند. این نقطهی شروع حرکت است.
گام 2:
همزمان فاز A و فاز B تحریک شدهاند. میدان مغناطیسی حاصل، بین دو محور A و B قرار میگیرد. روتور نصف زاویهی پله کامل میچرخد و در زاویهی بین فازها میایستد. یعنی حرکت نرم تر از پله کامل انجام میشود.
گام 3:
حالا فقط فاز B فعال است. روتور روی محور B میایستد. با این کار، دومین نیمپله کامل میشود (معادل یک پله کامل).
گام 4:
دوباره فازهای B و A (بعدی) با هم فعالاند. روتور بین محورهای B و A بعدی قرار میگیرد و نیمپلهی بعدی را طی میکند.
گام 5:
فقط فاز A (بعدی) فعال میماند. روتور در امتداد فاز جدید قرار میگیرد (یعنی یک پله کامل دیگر جلو رفته).
گام 6:
دوباره هر دو فاز A و B با هم فعال میشوند. روتور بین این دو محور قرار میگیرد (نیمپلهی بعدی).
گام 7:
فقط فاز B فعال میشود. روتور با زاویهی نصف پلهی کامل دیگر چرخیده است.
گام 8:
هر دو فاز B و A (اولی) با هم فعالاند. روتور در موقعیت بین آن دو میایستد و مسیر یک دور کامل گامها را تکمیل میکند.
پله کوچک
در عملکرد پله کوچک، زاویه پایه به مقادیر کوچکتر، حتی ۲۵۶ قسمت، تقسیم میشود. وقتی که افزایش نرمی حرکت مورد نظر باشد، عملکرد گام کوچک یا ریز مورد توجه قرار میگیرد. در این روش، کنترلکنندهی درایور موتور، جریان عبوری از دو فاز استاتور را بهصورت پیوسته و سینوسی تغییر میدهد. برخلاف حالت پلهای که فقط یکی از فازها روشن یا خاموش میشود، در microstepping هر دو فاز همیشه تا حدی فعالاند، ولی جریانشان بهصورت دقیق کنترل میشود.
نحوه تبدیل پالس به حرکت
به سیمپیچهای استاتور موتور، به ترتیب پالسهای الکتریکی داده میشود. این تحریک باعث ایجاد میدان مغناطیسی متوالی میشود. روتور که یا مغناطیس دائمی دارد یا از جنس آهن نرم دندانهدار است، به سمت میدان مغناطیسی فعال کشیده میشود. با هر بار تغییر تحریک، روتور یک گام (Step) حرکت میکند.
روابط
- زاویه هر پالس:
- در این رابطه، N تعداد قدمهای کامل در یک دور است و M ضریب میکرو-استپ.
- theta_step زاویهای است که موتور با هر پالس حرکت میکند.
- تعداد پالس لازم برای یک زاویه مشخص:
- در این رابطه، theta زاویهی مورد نظر است.
- P تعداد پالسی است که باید به موتور بدهیم تا به آن زاویه برسد.
- رابطهی گشتاور و جریان (تقریبی):
- در این رابطه، K_T ثابت گشتاور موتور است (وابسته به طراحی موتور).
- Torque گشتاور خروجی و Current جریان عبوری از سیمپیچ موتور است.
مشخصات کلیدی در عملکرد
- حرکت گسسته: موقعیت هر پله دقیق و تکرارپذیر است.
- گشتاور در حالت سکون (Holding Torque): حتی بدون حرکت، موتور میتواند در برابر بار مقاوم باشد.
- گشتاور-سرعت: در سرعتهای پایین گشتاور بالا است اما با افزایش سرعت گشتاور کاهش مییابد.
- رزونانس: در برخی فرکانسها، لرزش و از دست دادن گام رخ میدهد.
مقایسه با سایر موتورها
مزایا:
کنترل موقعیت ساده و دقیق:
حرکت موتور پلهای به صورت گسسته است و هر پالس معادل یک زاویه مشخص خواهد بود، بنابراین بدون نیاز به انکودر میتوان موقعیت را بهطور دقیق کنترل کرد.
تکرارپذیری بالا:
موتور میتواند مسیرهای حرکتی را بارها و بدون خطا تکرار کند، مشروط به ثابت بودن شرایط بار و سیستم مکانیکی.
سادگی سیستم کنترلی:
درایو این موتورها تنها نیازمند تولید پالس است و به الگوریتمهای پیچیده کنترلی مانند آنچه در سرووموتورها استفاده میشود نیازی ندارد.
قابلیت شروع حرکت از حالت سکون:
موتور پلهای بدون نیاز به مدارهای کمکی یا شتابگیری تدریجی میتواند حرکت را از حالت سکون آغاز کند.
هزینه پایینتر:
قیمت خرید و تجهیزات کنترلی موتور پلهای نسبت به سرووموتور کمتر است و در بسیاری از کاربردهای سبک و متوسط اقتصادیتر محسوب میشود.
معایب:
افت گشتاور در سرعتهای بالا:
به دلیل محدودیتهای الکتریکی سیمپیچ و ایجاد نیروی ضد محرکه (Back-EMF)، در سرعت زیاد توان تولید گشتاور کاهش مییابد.
احتمال از دست دادن قدم (Step Loss):
در بارگذاری یا شتابگیری زیاد ممکن است موتور نتواند همه پالسها را دنبال کند و از موقعیت واقعی عقب بماند.
بازده پایینتر:
حتی در حالت سکون نیز برای حفظ موقعیت باید جریان در سیمپیچ برقرار باشد که موجب اتلاف انرژی میشود.
انواع موتور پله ای
رلوکتانسی متغیر
موتورهای پلهای رلوکتانس متغیر از اولین موتورهای پلهای هستند و استفاده از آنها امروزه متداول نیست. که در این مدل، روتور از آهن نرم دندانهدار ساخته شده و آهنربای دائم ندارد. هنگام تغذیهی یکی از سیمپیچهای استاتور با جریان مستقیم (DC)، قطبهای مغناطیسی در آن بخش از استاتور ایجاد میشوند و دندانههای روتور برای قرار گرفتن در راستای این قطبها میچرخند تا مسیر شار مغناطیسی کمترین مقاومت یا «رلوکتانس» را داشته باشد. با تغییر متوالی جریان در فازهای مختلف استاتور، میدان مغناطیسی در جهتهای گوناگون شکل میگیرد و روتور در هر مرحله به اندازهی یک پله میچرخد. به این ترتیب، حرکت موتور بهصورت پلهای و قابلکنترل انجام میشود، هرچند به دلیل نداشتن آهنربای دائم، گشتاور آن کمتر از انواع هیبریدی است.
مزایا:
موتور رلوکتانسی متغیر ساختاری ساده و ارزان دارد، زیرا روتور آن از آهن نرم ساخته شده و فاقد آهنربای دائم یا جاروبک است. این موضوع باعث میشود موتور دوام بالایی داشته باشد و تعمیر و نگهداری آن آسان باشد. کنترل آن نیز ساده است، چون تنها با تغییر توالی جریان در فازهای استاتور میتوان سرعت و جهت چرخش را تنظیم کرد. همچنین به دلیل حرکت پلهای، موقعیت روتور بهصورت دقیق و بدون نیاز به سنسور موقعیت قابل کنترل است.
معایب:
در مقابل، این نوع موتور گشتاور خروجی نسبتاً پایینی دارد و در سرعتهای بالا کارایی آن کاهش مییابد. بهدلیل ماهیت پلهای حرکت، لرزش و نویز مکانیکی بیشتری تولید میکند و حرکت آن نسبت به موتورهای هیبریدی کمتر نرم است. علاوه بر این، در حالت بدون انرژی نمیتواند موقعیت خود را حفظ کند و کنترل دقیق گشتاور در آن دشوارتر است، به همین دلیل امروزه کمتر در کاربردهای صنعتی پیشرفته مورد استفاده قرار میگیرد.
کاربرد ها:
موتورهای رلوکتانسی متغیر بهدلیل ساخت ساده و قیمت پایین، بیشتر در کاربردهای آموزشی، تحقیقاتی و آزمایشگاهی استفاده میشوند. در گذشته از آنها در چاپگرهای قدیمی، درایو فلاپیدیسک، ابزارهای اندازهگیری مکانیکی و سیستمهای نشانگر به کار میرفت. امروزه نیز در پروژههای سادهی کنترل موقعیت یا در محیطهای آموزشی برای درک اصول کار موتورهای پلهای و میدان مغناطیسی مورد استفاده قرار میگیرند، اما در کاربردهای صنعتی مدرن جای خود را به موتورهای هیبریدی و دائممغناطیس دادهاند که گشتاور و دقت بالاتری دارند.
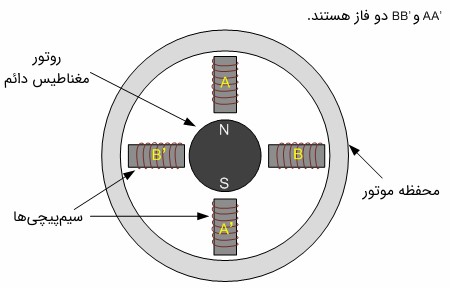
مغناطیسی دائمی
زاویه پله معمولی یک موتور پلهای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی میشود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش مییابد. موتورهای پلهای آهنربای دائم به دلیل مقادیر بالاتر زاویههای پله، رزولوشن یا دقت و نرمی پایینتری دارند. البته این موتورها، موتورهای کمهزینهای هستند. دارای روتوری است که از آهنربای دائم ساخته شده و قطبهای شمال و جنوب بهصورت متناوب در آن قرار دارند. این ساختار باعث میشود شدت شار مغناطیسی و در نتیجه گشتاور موتور نسبت به انواع رلوکتانسی بیشتر باشد. زاویه هر پله در این موتورها معمولاً بین 7.5 تا 15 درجه است، بنابراین حرکت آنها نسبت به موتورهای هیبریدی دقت و نرمی کمتری دارد. با این حال، بهدلیل طراحی ساده، قیمت پایین و گشتاور مناسب، در کاربردهای سبک و کمهزینه مورد استفاده قرار میگیرند.
مزایا:
موتور پلهای مغناطیس دائم به دلیل داشتن روتور آهنربای دائم، گشتاور نگهدارنده و گشتاور راهاندازی بالاتری نسبت به موتورهای رلوکتانسی دارد. ساختار آن ساده است، نیاز به نگهداری کمی دارد و کنترل آن آسان است. همچنین از نظر مصرف انرژی و هزینه ساخت، گزینهای مقرونبهصرفه محسوب میشود و برای سیستمهای ساده کنترل موقعیت مناسب است.
معایب:
این نوع موتور دقت زاویهای و نرمی حرکت کمتری دارد، زیرا زاویه هر پله معمولاً بزرگتر (۷٫۵ تا ۱۵ درجه) است. در نتیجه، برای کاربردهایی که به دقت بالا نیاز دارند، مناسب نیست. علاوه بر این، در مقایسه با موتورهای هیبریدی گشتاور خروجی آن در سرعتهای بالا کاهش مییابد و کنترل دقیق موقعیت در آن محدود است.
کاربرد ها:
موتورهای پلهای مغناطیس دائم معمولاً در وسایل کمهزینه و با نیاز به کنترل ساده موقعیت به کار میروند؛ مانند چاپگرها، اسکنرها، تجهیزات خودکار کوچک، ابزارهای پزشکی سبک، و دستگاههای آموزشی. همچنین در پروژههای رباتیک و کنترل ساده حرکتی، بهدلیل قیمت پایین و راهاندازی آسان، کاربرد گستردهای دارند.
هیبریدی
این نوع موتور، ترکیبی از موتور پلهای مغناطیس دائم و موتور پلهای رلوکتانس متغیر است. از آنجایی که زاویههای پله معمولی یک موتور پله ترکیبی از 3٫6 درجه تا 0٫9 درجه متغیر است، عملکرد موتور، گشتاور و مشخصههای سرعت این نوع موتورها در مقایسه با موتور پلهای آهنربای دائم بهتر است. روتور این موتورها مانند موتور رلوکتانس متغیر است. آهنربا به صورت محوری مغناطیسی شده و به صورت متحدالمرکز در اطراف آن شار به وجود میآورد. موتور هیبریدی با ترکیب ویژگیهای موتور پلهای مغناطیس دائم و رلوکتانس متغیر، قادر است دقت و گشتاور بالاتری نسبت به موتورهای پلهای ساده ارائه دهد. روتور این موتورها به صورت چندقطبی و مغناطیسی شده طراحی شده و با ایجاد میدان مغناطیسی متحدالمرکز، حرکتهای پلهای بسیار دقیق و کنترل شدهای تولید میکند. این ساختار باعث میشود لرزش و نویز در هنگام حرکت کاهش یابد و توانایی موتور در موقعیتیابی دقیق و عملکرد نرم افزایش یابد.
مزایا:
مهمترین مزیت موتور هیبریدی، دقت و رزولوشن بالای آن است. این موتور توانایی تولید گشتاور بالا در سرعتهای پایین و متوسط دارد و حرکتهای نرمتر و کنترل شدهتری ارائه میدهد. همچنین، نسبت به موتورهای پلهای ساده، لرزش و نویز کمتری ایجاد میکند و قابلیت استفاده در سیستمهای نیازمند موقعیتیابی دقیق را دارد.
معایب:
از جمله معایب این موتور میتوان به پیچیدگی ساخت و هزینه بالاتر نسبت به موتورهای پلهای ساده اشاره کرد. همچنین، در سرعتهای بسیار بالا ممکن است راندمان کاهش یابد و نیاز به کنترلرهای دقیق و پیچیده برای مدیریت جریانها و پالسها دارد. وزن روتور نیز نسبت به موتورهای ساده کمی بیشتر است که میتواند محدودیت در برخی کاربردها ایجاد کند.
کاربرد ها:
موتورهای هیبریدی در سیستمهایی که دقت و کنترل موقعیت اهمیت دارد، کاربرد فراوانی دارند. از جمله این کاربردها میتوان به پرینترهای سهبعدی، اسکنرها، دوربینهای خودکار، تجهیزات پزشکی، رباتیک و ماشینآلات CNC اشاره کرد. همچنین در سیستمهای اتوماسیون صنعتی که نیاز به حرکت دقیق و کنترل سرعت مطلوب دارند، بهطور گسترده استفاده میشوند.
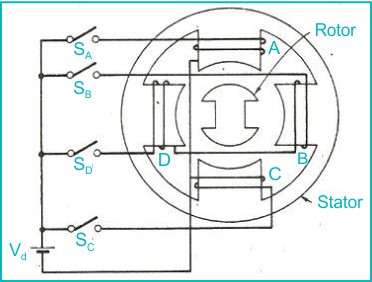
تک قطبی
موتور تک قطبی دارای سیمپیچهایی است که بهصورت مرکزی تقسیم شدهاند و جریان میتواند در یک جهت از هر نیمسیمپیچ عبور کند. این طراحی باعث میشود جهت جریان به راحتی تغییر کند و کنترل موتور سادهتر باشد. حرکت روتور به صورت پلهای انجام میشود و معمولاً زاویه پله بین ۷٫۵ تا ۱۵ درجه است.
مزایا:
کنترل ساده و نیاز به مدار راهاندازی کمتر دارد. همچنین برای سرعتهای پایین و بارهای سبک مناسب است و طراحی مدار کنترل آن نسبت به موتور دو قطبی آسانتر است.
معایب:
گشتاور تولیدی کمتر از موتور دو قطبی است و راندمان پایینتری دارد. همچنین، به دلیل استفاده از سیمپیچهای بیشتر، حجم و وزن موتور کمی بیشتر میشود.
کاربرد ها:
در وسایلی با نیاز به کنترل ساده و دقت متوسط استفاده میشود، مانند پرینترهای قدیمی، تجهیزات اداری، ماشینهای کوچک CNC و دستگاههای اندازهگیری سبک.
دو قطبی
موتور دو قطبی دارای سیمپیچهای کامل بدون مرکز تقسیم است و جهت جریان باید برای تغییر قطبها معکوس شود. این طراحی باعث میشود روتور بتواند از تمام طول سیمپیچ برای تولید میدان مغناطیسی استفاده کند و حرکتهای پلهای دقیق و پرقدرت تولید شود.
مزایا:
گشتاور بالاتر و راندمان بهتر نسبت به موتور تک قطبی دارد. زاویه پله کوچکتر و دقت بیشتر است و برای بارهای سنگینتر و سرعتهای بالاتر مناسب است.
معایب:
مدار راهاندازی پیچیدهتر و نیازمند پل H یا مدار معکوسکننده جریان است. کنترل آن نسبت به موتور تک قطبی سختتر است و هزینه بیشتری دارد.
کاربرد ها:
در سیستمهای نیازمند دقت بالا و گشتاور خوب کاربرد دارد، مانند پرینترهای سهبعدی، رباتیک، CNC، تجهیزات پزشکی و دستگاههای اتوماسیون صنعتی.
جمعبندی کلی:
موتورهای پلهای به پنج دسته اصلی تقسیم میشوند: آهنربای دائم، رلوکتانس متغیر، هیبریدی، تک قطبی و دو قطبی. هر کدام ویژگیها، مزایا و محدودیتهای خاص خود را دارند. موتورهای آهنربای دائم و رلوکتانس متغیر سادهتر و ارزانتر هستند، اما دقت و گشتاور آنها نسبت به موتورهای هیبریدی و دو قطبی کمتر است. موتور هیبریدی با ترکیب ویژگیهای مغناطیس دائم و رلوکتانس متغیر، دقت و گشتاور بالاتری ارائه میدهد و حرکت نرمتر و کنترلشدهتری فراهم میکند، اما هزینه و پیچیدگی آن بیشتر است. در بین موتورها، موتور تک قطبی کنترل سادهای دارد و برای سرعت پایین و بار سبک مناسب است، اما گشتاور و راندمان آن محدود است. موتور دو قطبی گشتاور بالاتر، راندمان بهتر و زاویه پله کوچکتر دارد و برای کاربردهای دقیق و بارهای سنگینتر ترجیح داده میشود، اما مدار راهاندازی آن پیچیدهتر است.
انواع سیم پیچی
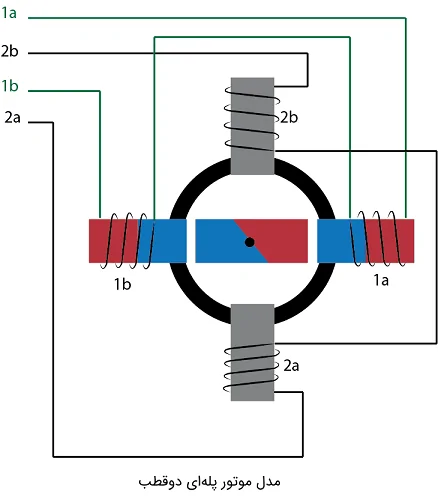
یک طبقهبندی دیگر موتورهای پلهای بر اساس نوع آرایش سیمپیچ پایه دو فاز آنها است که به دو دسته موتور پلهای تکقطبی (Unipolar Stepper Motor) و موتور پلهای دوقطبی (Bipolar Stepper Motor) تقسیم میشوند. تفاوت اصلی بین موتورهای پلهای تکقطبی و دوقطبی این است که عملکرد موتور تکقطبی با یک پلاریته است، در حالی که موتور دوقطبی در هر دو ولتاژ مثبت و منفی کار میکند. یک تفاوت دیگر بین موتورهای پلهای تکقطبی و دوقطبی در این است که در موتورهای پلهای تکقطبی، یک سیم جدا برای هر یک از سیمپیچیها مورد نیاز است تا جریان از یک سمت به یک انتهای دیگر سیمپیچ منتقل شود.
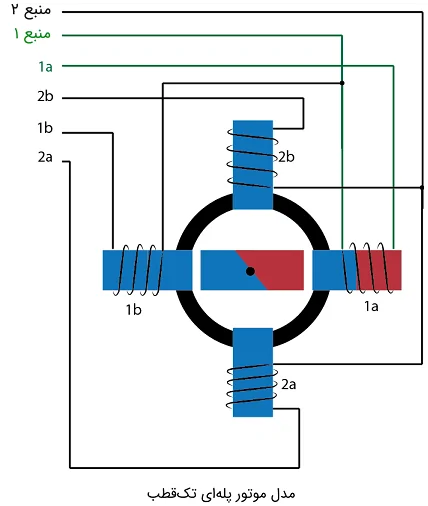
به عبارت دیگر، در موتور پلهای تکقطبی دو سیمپیچی برای هر فاز وجود دارد. دو سیمپیچی هر قطب ممکن است سیمهای مشترکی داشته باشند و از میان آنها انشعاب گرفته شود. موتور تکقطبی عملکرد سادهای دارد، زیرا در آن نیازی به معکوس کردن جریان با یک مدار درایور خارجی نیست. شکل زیر، سیمبندی این نوع موتور را نشان میدهد. به دلیل وجود سیم اضافه در میانه سیمپیچها، موتور پلهای تکقطبی نصف مقدار شار مغناطیسی خود را برای شارش جریان کاهش یافته تولید میکند. بنابراین، موتور پلهای دوقطبی گشتاور بیشتری نسبت به یک موتور پلهای تکقطبی تولید میکند.
مزایا و معایب
مزایا
به دلیل حرکت دقیق موتورهای پلهای، کنترل سرعت چرخش آنها بسیار آسان است. به همین دلیل، موتورهای پلهای در کاربردهای رباتیک و اتوماسیون با استقبال فراوانی روبهبرو شدهاند. ساختار ساده و هزینه تعمیر و نگهداری کم از دیگر مزایای این موتورها است. موتورهای پلهای را میتوان به سادگی با هر تغییر محیطی تنظیم کرد و تطبیق داد. این موتور، ماشین بسیار قابل اطمینانی است. ویژگی مهم دیگر موتور پلهای حساسیت بالای آن به راهاندازی، توقف و عملکردهای دیگر است. موتور پلهای مشخصه عملکرد بسیار جذابی نیز دارد. از آنجایی که گشتاور در سرعت پایین در موتورهای پلهای نسبتاً بزرگتر است، در کاربردهایی که گشتاور بالا در سرعت پایین مورد نیاز است استفاده از این موتورها ترجیح داد میشود. عدم وجود جاروبک در موتورهای پلهای یک مزیت محسوب میشود، زیرا طول عمر کلی موتور افزایش پیدا میکند. اگر سیمپیچیهای فاز موتور پلهای انرژیدار شوند، روتور حداکثر گشتاور را در حالت سکون تولید خواهد کرد.
معایب
یکی از معایب اصلی این نوع موتورهای DC این است که به مقدار جریان بیشتری نسبت به یک موتور DC عادی نیاز دارند. هرچند گشتاور تولیدی این موتورها در سرعتهای کم نسبتاً بالاتر است، اما در سرعتهای بالا گشتاور این موتورها کم است و در سرعت بالا عملکرد مناسبی ندارند. علاوه بر این، موتورهای پلهای نسبتاً بازده کمی دارند. عدم وجود ساز و کار فیدبک یکی دیگر از معایب موتورهای پلهای است.
کاربردها
همانطور که قبلاً نیز اشاره شد، موتورهای پلهای در سیستمهای کنترل موقعیت مورد استفاده قرار میگیرند، زیرا کنترل دقیق موقعیت با کمک موتورهای پلهای کنترل شده با رایانه آسان است. همچنین، موتورهای پلهای به طور گسترده در تجهیزات زیست پزشکی استفاده میشوند که در آنها کنترل دقیق موقعیت لازم است. این موتورها در درایورهای دیسک، چاپگرهای رایانهای و اسکنرها، نورپردازی هوشمند، لنزهای دوربین و سایر وسایل و تجهیزات رایج دیگر نیز کاربرد دارند.
به دلیل ویژگی دقیق بودن موتورهای پلهای، این موتورها در رباتیک نسبت به سایر موتورها ترجیح داده میشوند. موتورهای پلهای در دوربینهای سهبعدی، سیانسیها و برخی دیگر از سیستمهای دوربینها نیز به دلیل قابلیت اطمینان و دقت بالایی که دارند مورد استفاده قرار میگیرند.
کاربرد در صنعت
ماشینهای CNC و پرینترهای سهبعدی
در ماشینهای CNC و چاپگرهای سهبعدی، حرکت دقیق در محورهای خطی (X، Y، Z) برای دقت ابعادی قطعهکار یا مدل سهبعدی ضروری است. موتور پلهای به دلیل قابلیت حرکت گسسته و کنترلپذیری موقعیت بدون نیاز به فیدبک خارجی (در حالت open-loop) به عنوان یکی از رایجترین محرکهها در این سامانهها بهکار میرود.
موتور پلهای به یک مکانیزم انتقال حرکت نظیر پیچ بالاسکرو (Ball Screw) یا تسمه تایمینگ متصل میشود. هر پالس الکتریکی اعمالشده به موتور معادل با یک زاویهی مشخص چرخش روتور است. چرخش روتور پس از انتقال توسط مکانیزم مکانیکی، منجر به جابهجایی خطی میز ماشین یا هد چاپگر میشود.
مزایا:
- دقت بالا در تعیین موقعیت و تکرارپذیری حرکت.
- سادگی درایو و عدم نیاز به سیستم بازخورد در بسیاری از کاربردها.
- هزینه کمتر نسبت به سرووموتور در کاربردهای سبک تا متوسط.
محدودیتها:
- افت گشتاور در سرعتهای بالا به دلیل محدودیتهای الکتریکی و مغناطیسی.
- امکان از دسترفتن قدمها در صورت اعمال بار بیش از ظرفیت یا شتاب زیاد.